1、连接控制柜和外部轴的动力线和编码器线

(外部轴动力线)

(连接机器人底部RDC编码器线)

2、Workvisual外部轴添加与配置
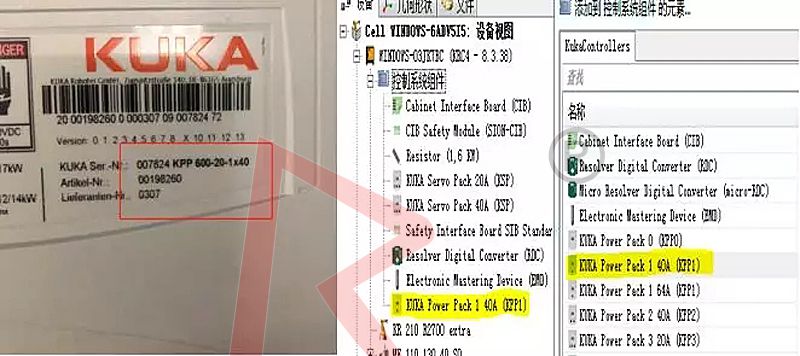
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:
(右键控制系统组件添加)
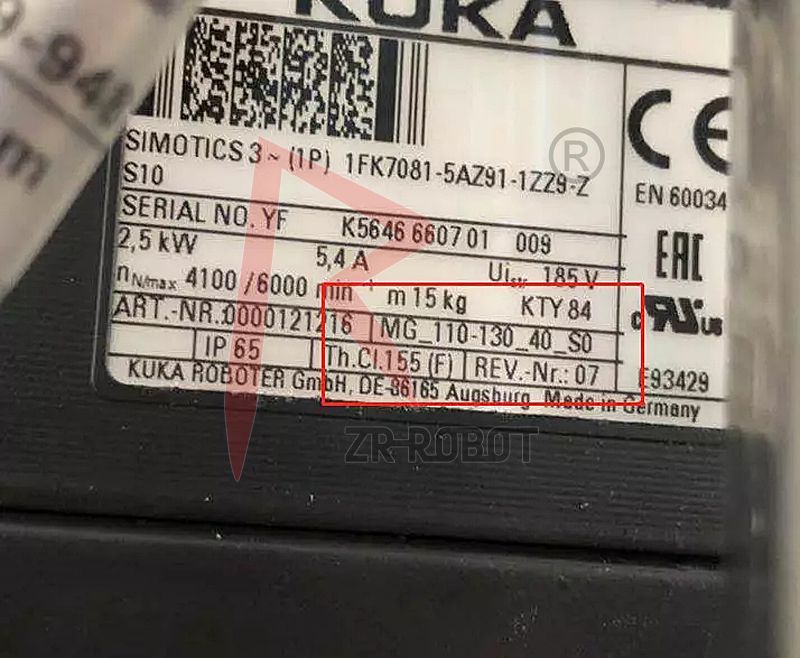
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
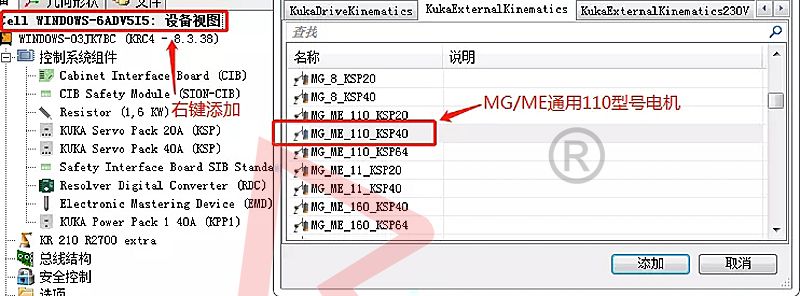
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
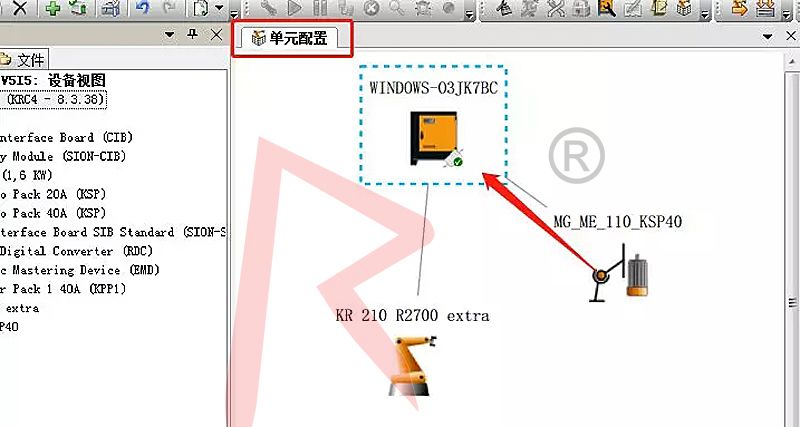
(4)在单元配置中将添加的外部轴电机与控制柜连接:
(拖住电机连接控制柜)
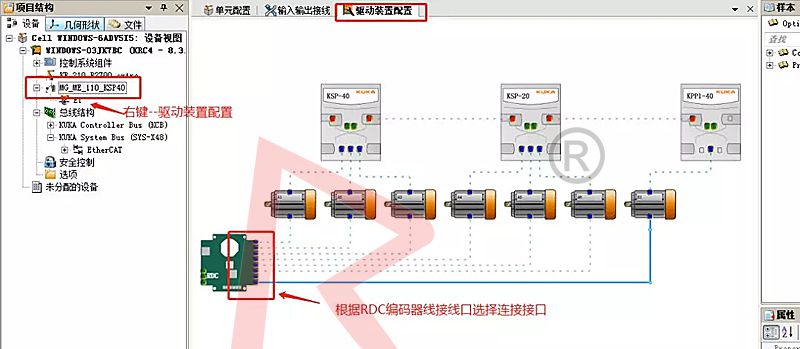
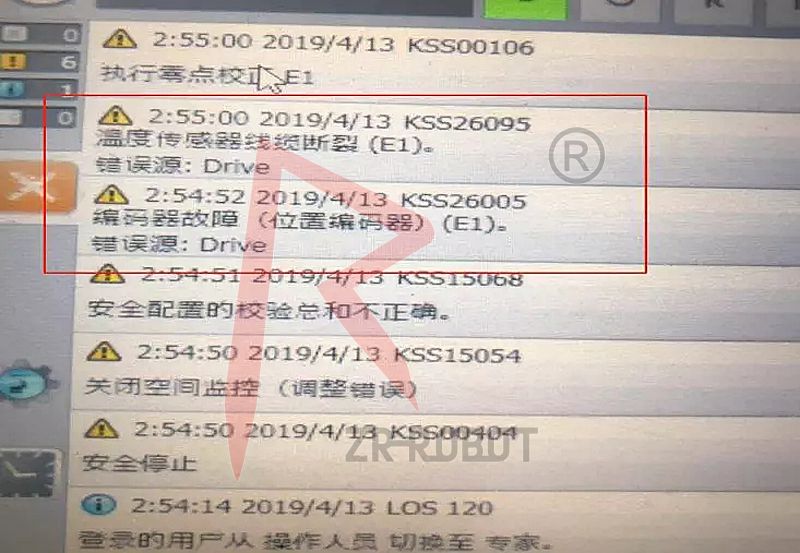
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
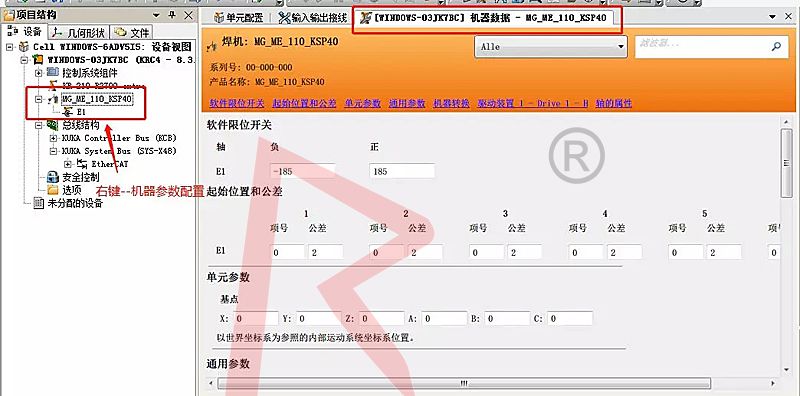
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。

(8)导入项目后进行安全配置:(注意切换安全员用户)
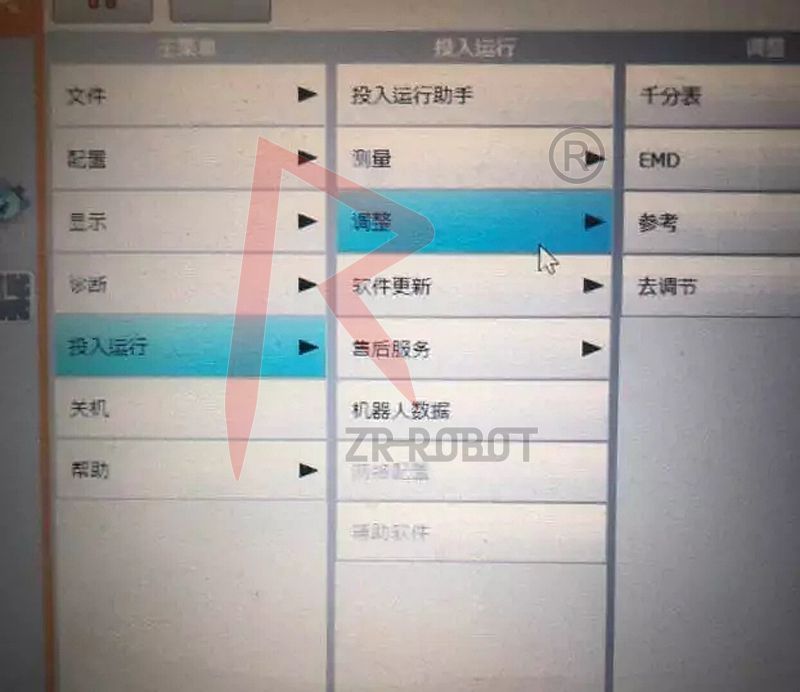
(9)外部轴零点丢失(进行零点校正):
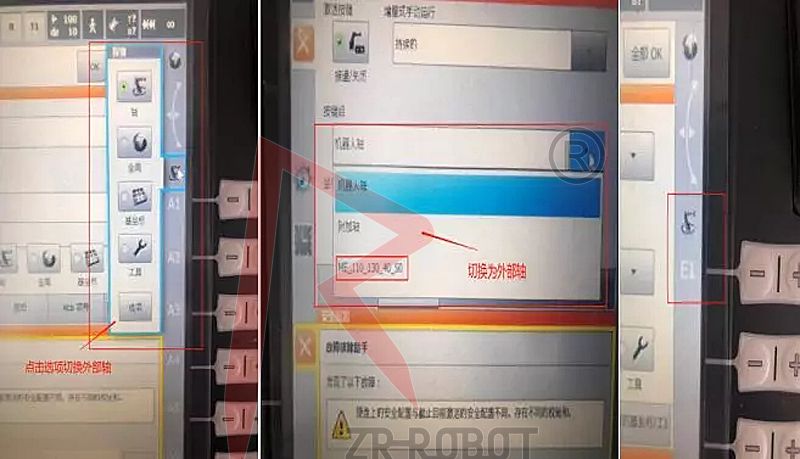
(10)外部轴动作方式的切换: