



与机器人相关的坐标系
在工业机器人的操作、编程和投入运行时坐标系具有重要的意义。在机器人控制系统中定义了下列坐标系:
WORLD | 世界坐标系
ROBROOT | 机器人足部坐标系
BASE | 基坐标系
FLANGE | 法兰坐标系
TOOL | 工具坐标系
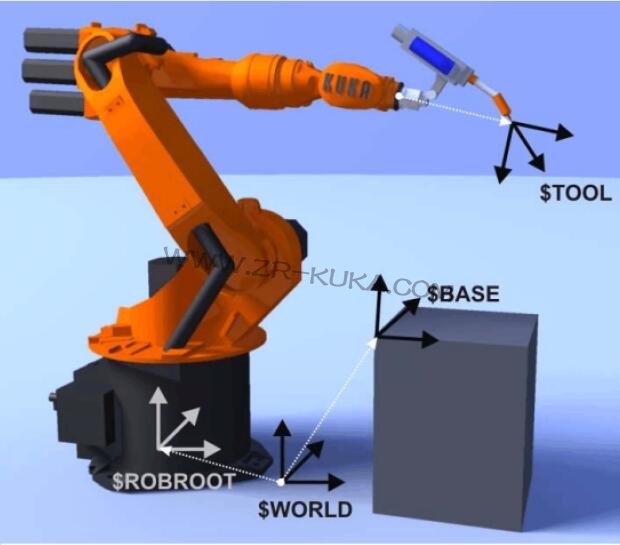
图 2-6: KUKA 机器人上的坐标系
| 名称 | 位置 | 应用 | 特点 |
| WORLD |
可自由定义
|
ROBROOT 和
BASE 的原点
|
大多数情况下位于机器人足部。
|
|
ROBROOT
|
固定于机
器人足内
|
机器人的原点 |
说明机器人在世界坐标系中的位置。
|
| BASE |
可自由定
义
|
工件,工装 |
说明基坐标在世界坐标系中的位置。
|
| FLANGE |
固定于机
器人法兰
上
|
TOOL 的原点 | 原点为机器人法兰中心。 |
| TOOL |
可自由定
义
|
工具 |
TOOL 坐标系的原点被称为“TCP ”。
( TCP = Tool Center
Point ,即工具中心点) 。
|