一,电气连接二,初次上电三、安全配置四,机器人零点校正
DANGER 危险!
必须安装固定好机器人,才能通电操作机器人,否则在操作不当的情况下,机器人容易摔倒,造成设备损坏或人员安全问题。
机器人初次通电——电气连接
控制柜(标准型)接口图示如下:

机器人初次通电——电气连接
机器人本体接口图示如下:

机器人初次通电——电气连接
以上为控制柜和机器人的示例接口,控制柜型号和机器人型号不一样,对应接口会略有差别,但标签会是一样的,请留意。
对应接口的接线及说明如下:
1,X1接头:控制柜供电接口。
(1)KRC4stand&KRC4Midsize&KRC4Extend:三相四线制,380VAC交流电;
①KRC4stand&KRC4Midsize额定功率:13.5kVA
②KRC4Extend额定功率:根据配置不同,功率不同,如有需要请联系库卡(2)KRC4Compact&KRC4Smallsize:欧洲标准插头,220VAC交流电,额定功率2kVA;其中,220VAC供电插头已接好,直接接入即可;
380VAC供电插头需用户接入,如下:

机器人初次通电——电气连接
2,X11:机器人安全回路接口,接线图根据控制柜型号不同,接线方式也不一样。
(1)KRC4stand&KRC4Midsize&KRC4Extend控制柜:
急停、安全门信号说明:建议接入相应的安全装置里,如果确定不需要接入,将相应的通道短接即可,如下所示:
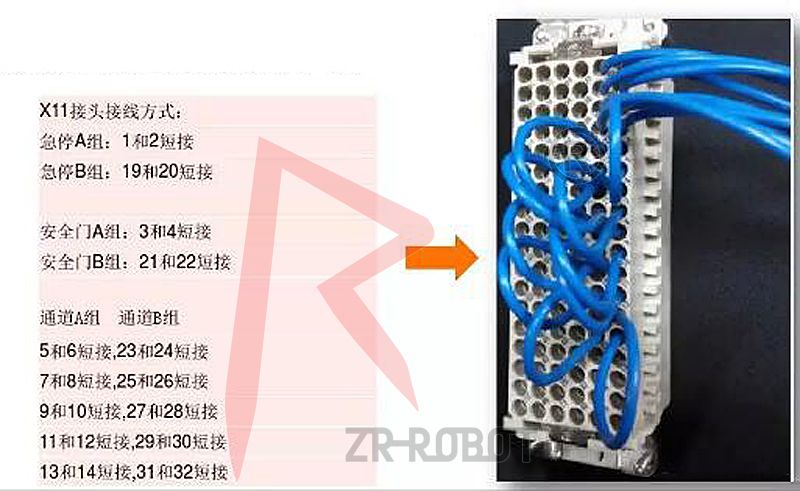
机器人初次通电——电气连接
2,机器人安全回路接口,接线图根据控制柜型号不同,接线方式也不一样。
(2)KRC4Compact&KRC4Smallsize控制柜:
急停、安全门信号说明:建议接入相应的安全装置里,如果确定不需要接入,将相应的通道短接即可,如下所示:
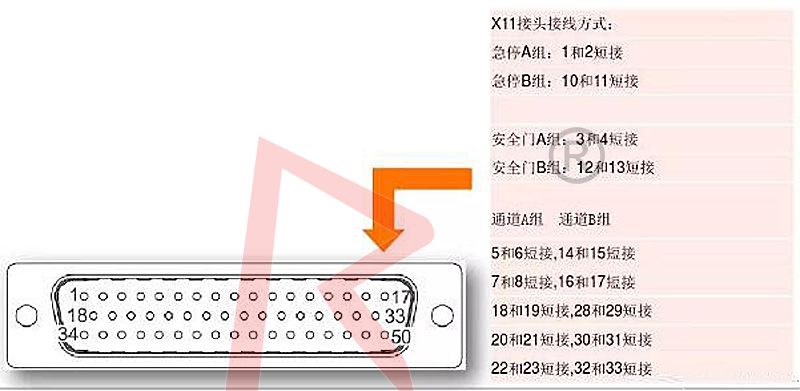
机器人初次通电——电气连接
3,X51:集线器,用于客户信号线、通讯总线、网线等的接入,目的防尘防水。
4,X20-×30:控制柜接口-机器人本体接口,控制柜到机器人本体的动力线。
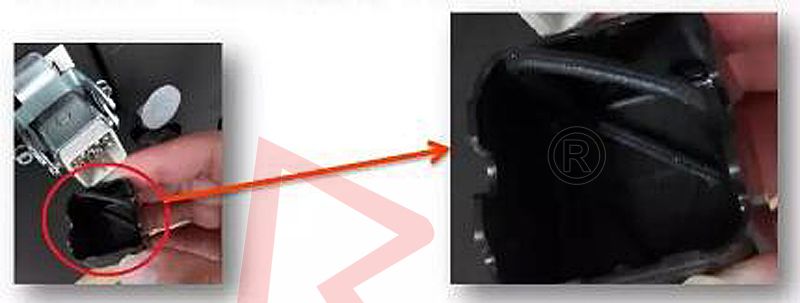
5,X21-×31:控制柜接口-机器人本体接口,控制柜给机器人本体的数据线。
注意:取下机器人本体X31接头的黑色保护盖时,密封圈易随着保护盖一起掉出来,需将密封圈取出并重新接入到×31接头。
6,X19:控制柜接口,用于接入库卡示教器SmartPAD。
7,×32:机器人本体接口,用于接入库卡零点校正工具,校正机器人零点。
机器人初次通电——电气连接
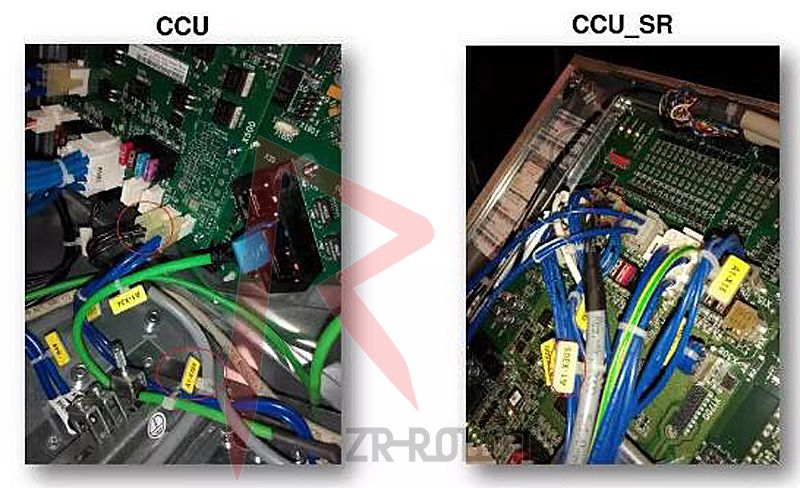
8,控制柜内部蓄电池X305接口接入到控制柜控制单元(CCU或CCU_SR),图示如下
机器人初次通电——电气连接
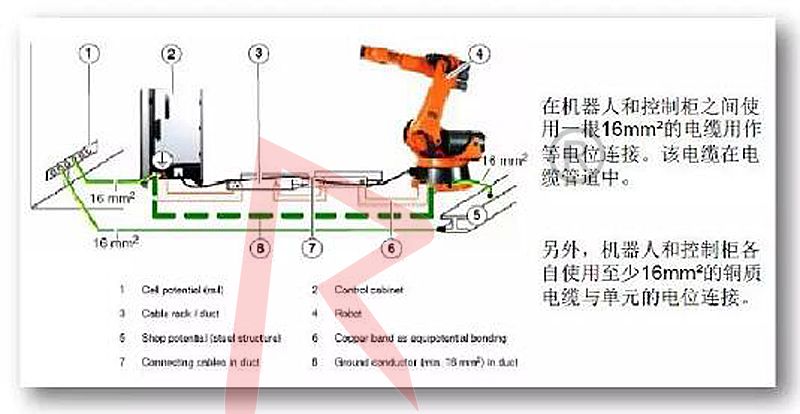
9,机器人系统的接地,如下图的示例:等电位连接
机器人初次通电——电气连接
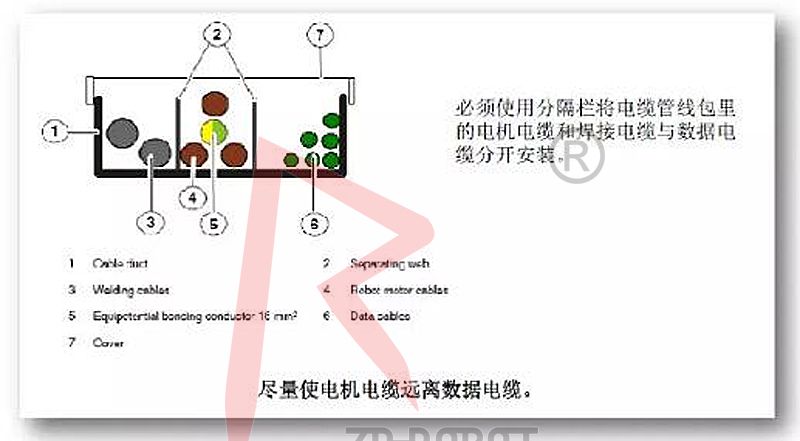
10,机器人配套线缆的现场布线,如下图:
机器人初次通电——初次上电
在做好电气连接后,在机器人通电前,必须用万用表测量控制柜的供电大小,确认电源没有缺相,电压的等级符合机器人对电源的要求,确认完毕后即可通电。

备注:控制柜型号差异,电源的上电开关会有所不同
机器人初次通电——初次上电
机器人初次通电——初次上电
机器人第一次上电,示教器有时会出现如下界面,届时请耐心等待机器人最后的上电完成,进入到KSS系统里,图片如下:
机器人初次通电——初次上电
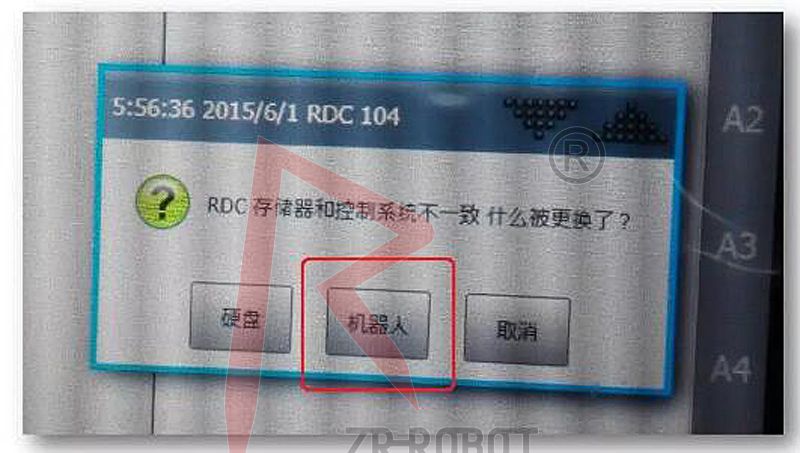
机器人KSS系统里,会提示选择机器人信息的对话框,选择“机器人”按钮,如下:
机器人初次通电——初次上电
承接上一步骤,通过示教器确认所有消息,单击消息提示区域,此时一定会弹出如图所标示的报警消息,如下:
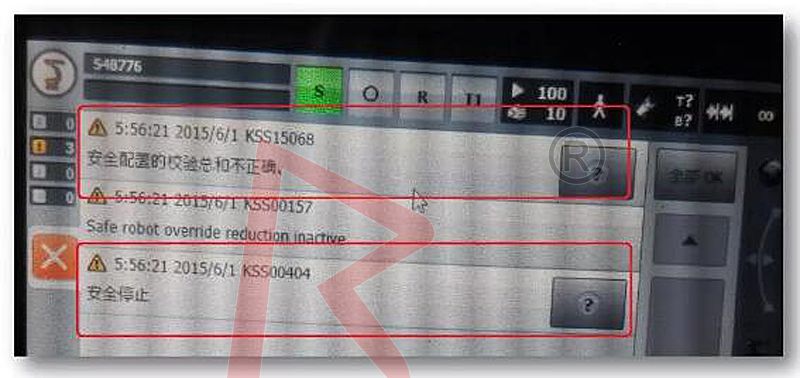
这种消息提示,需要我们确认机器人的安全配置。在某些情况下,配置项目下载到机器人激活时,也会有同样的消息,同样通过确认机器人安全配置来处理。
机器人初次通电——安全配置
安全配置目的:是为了控制柜系统的数据、KSS软件的机器参数与实际机器人一致。
对于初次上电机器人,必须对此进行确认,才能正常操作机器人。步骤如下:
1,登陆到“SafetyMaintenance”(安全调试人员):
进入:“主菜单配置>用户组”,选中对应用户组,输入登陆密码“kuka”完成登陆。

机器人初次通电——安全配置
安全配置目的:是为了控制柜系统的数据、KSS软件的机器参数与实际机器人一致。
对于初次上电机器人,必须对此进行确认,才能正常操作机器人。步骤如下:
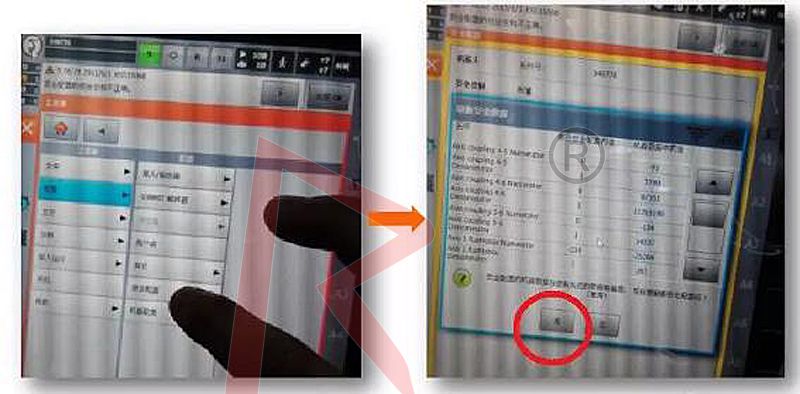
2,进入菜单“主菜单>配置>安全配置”,如果有弹出如下的界面,单击“是”,如图
机器人初次通电——安全配置
安全配置目的:是为了控制柜系统的数据、KSS软件的机器参数与实际机器人一致。
对于初次上电机器人,必须对此进行确认,才能正常操作机器人。步骤如下:
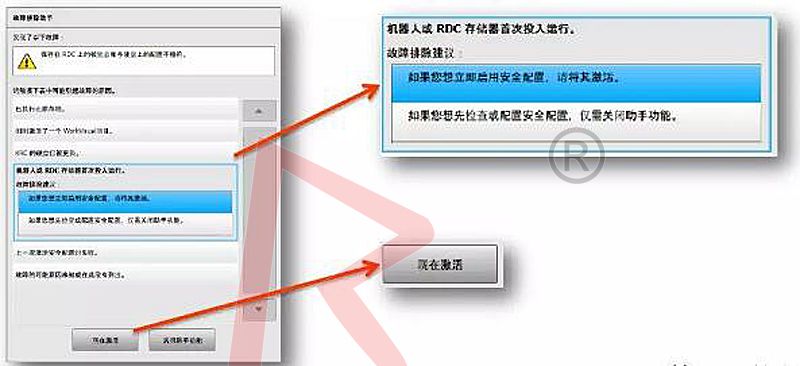
3,完成上述两步,示教器界面会弹出“故障排除助手”对话框,选择“机器人或RDC存储器首次投入运行”字段,然后单击下面的“现在激活”:
机器人初次通电——安全配置
安全配置目的:是为了控制柜系统的数据、KSS软件的机器参数与实际机器人一致。
对于初次上电机器人,必须对此进行确认,才能正常操作机器人。步骤如下:
4,在弹出来的确认对话框,选择“是”:
5,等待安全参数配置完全并回到KSS界面,然后单击确认所有消息,即能上电操作机器人。
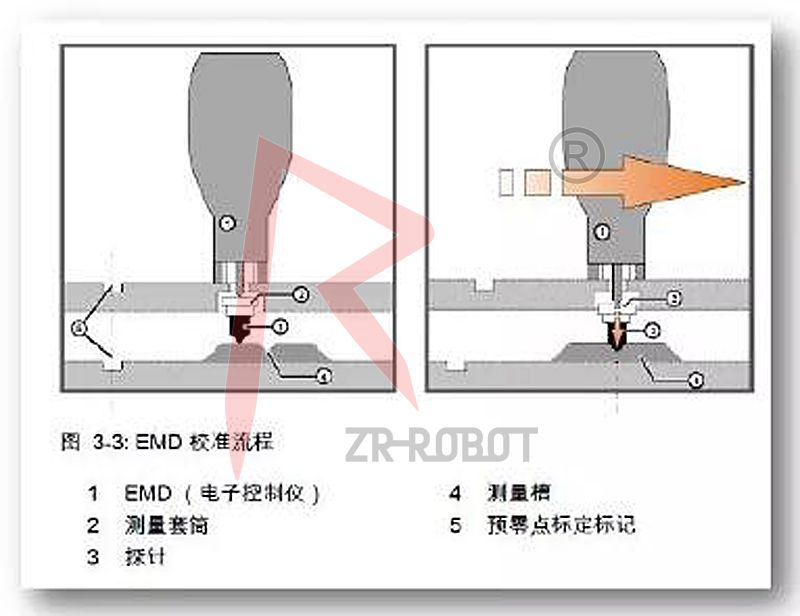
机器人初次通电——机器人零点校正
经过安全配置的操作,有时还会有报警消息“零点校正Ax”,X表示第几个轴丢失了零点。这时,只需要操作机器人进行零点校正即可。
零点校正的方式有2个:其一电子校正工具EMD或者MEMD,其二千分表。
零点校正的前提:将机器人轴移动到预校正零点的位置(如下图),每个轴的标识会有差异。

机器人初次通电——机器人零点校正
零点校正的原理:最凹槽的位置,即是该轴机器人机械零点的位置。电子校正工具根据操作步骤,自行找到零点;千分表属于手动方式,需要寻找千分表盘“指针”的拐点位置来确认。