



当库卡机器人出现异常时,首先要进行故障排查。机器人故障的表现形式多样,可能是动作不协调、运行速度异常或者完全无法启动等。对于控制器控制板的故障,需要从多个方面入手。
先检查外观。查看控制板是否有明显的损坏迹象,如元件烧焦、线路断裂等。这看似简单的步骤,却能快速发现一些直观的问题,为后续维修节省时间。使用专业的检测工具,对控制板上的各个电路节点进行电压、电流等参数的测量。通过对比正常值,可以判断出是否存在短路、断路或者元件损坏的情况。
还要关注控制器与机器人其他部件之间的通信是否正常。因为在复杂的工业生产环境中,通信故障也可能导致控制板出现异常表现。在排查过程中,要充分利用KUKA机器人维修的技术资料和手册,确保排查工作的全面性和准确性。
常见故障及维修方法
(一)元件损坏类故障
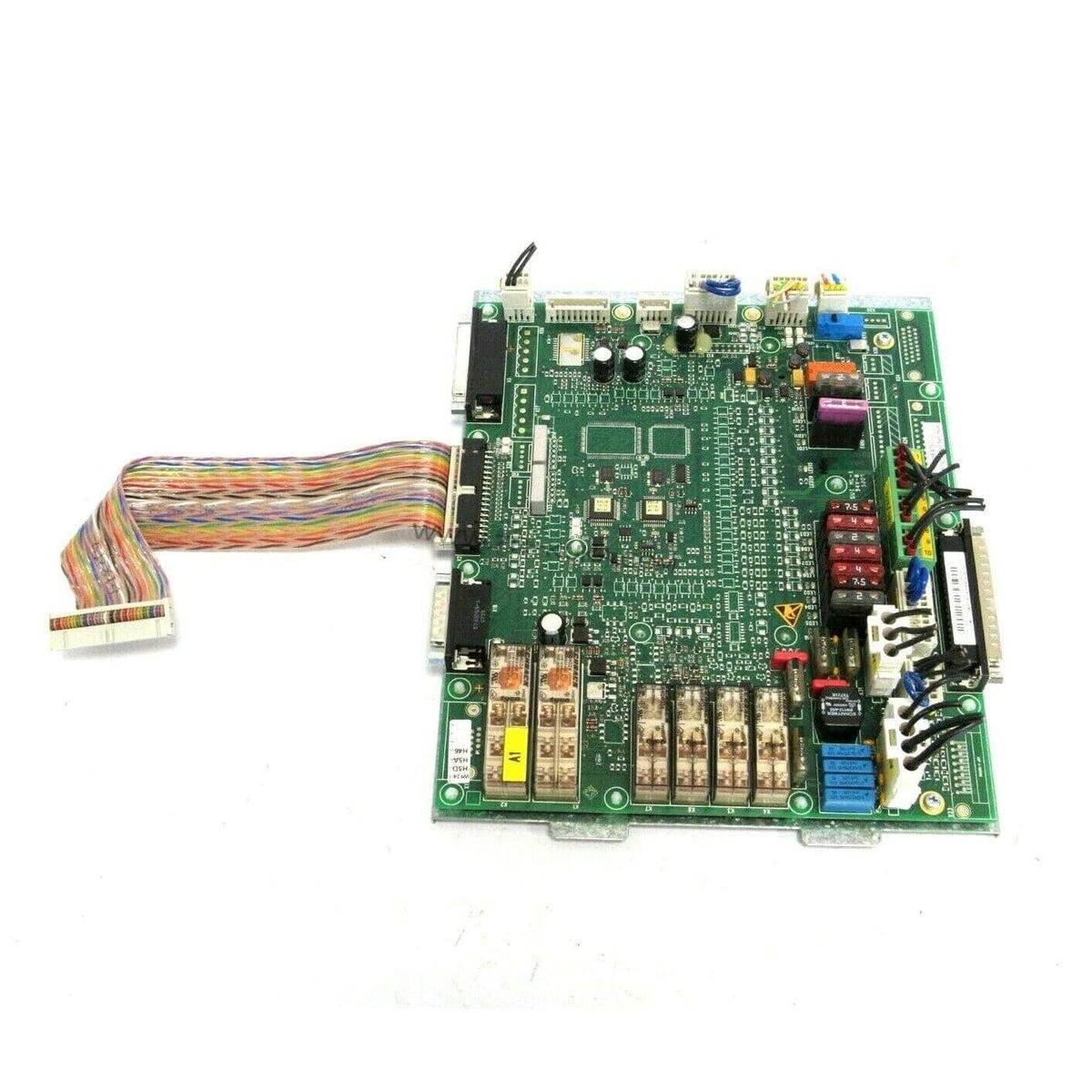
在长期运行过程中,控制板上的一些电子元件可能会因过热、过流等原因损坏。如电容可能会出现鼓包、漏液的现象,电阻可能会烧断。对于这类故障,需要使用同型号的元件进行替换。在进行元件更换时,要注意静电防护,避免因静电击穿新的元件。要确保焊接质量,保证元件与电路板之间的连接牢固可靠。这是库卡机器人控制柜维修中经常遇到的情况,需要具备扎实的电子技术基础和丰富的实践经验。
(二)线路故障
线路问题也是导致控制板故障的常见原因之一。可能是由于长期的振动、摩擦导致线路断裂,或者是插头松动。对于线路断裂的情况,可以使用专业的焊接工具进行修复;而对于插头松动的问题,则要检查插头的接触情况,必要时更换插头。在维修过程中,要特别注意线路的布局和走向,避免出现短路等新的故障。这同样是工业机器人维修中需要重点关注的部分。
(三)软件故障
除了硬件问题,控制板的软件也可能出现故障。如程序错误、参数设置不当等。这种情况下,需要对控制器进行重新编程或者参数调整。在操作之前,一定要备份好原有的程序和参数,以免造成数据丢失。通过专业的编程软件和工具,按照正确的流程进行操作,确保软件系统的正常运行。这也是KUKA机器人维修中不可或缺的环节。
在完成控制板的维修后,不能立即投入使用,而是要进行全面的测试。先进行静态测试,检查控制板的各项参数是否正常,元件是否工作稳定。进行动态测试,让机器人进行一些简单的动作,观察其运行情况是否符合要求。只有通过了严格的测试,才能确保维修的质量。
为了减少机器人故障的发生,日常的维护和保养工作至关重要。定期对库卡机器人进行检查,包括控制板的清洁、紧固螺丝、检查线路等。要严格控制工业机器人的工作环境,避免温度过高、湿度过大、灰尘过多等不利因素对设备的影响。操作人员要严格按照操作规程进行操作,避免误操作对机器人造成损坏。
总之,库卡机器人维修中的控制器控制板故障维修需要技术人员具备丰富的知识储备和实践经验。通过科学的故障排查方法、准确的维修技术和完善的测试预防措施,能够有效地解决控制板故障问题,保障库卡机器人的稳定运行,提高生产效率,降低企业的生产成本。在未来的工业生产中,随着技术的不断发展,工业机器人维修技术也将不断创新和完善,为工业自动化的发展提供更有力的支持。