



库卡KUKA六轴机器人的死点
机器人的死点是指轨迹上点间的运动不能通过笛卡尔变换实现。在这些点的附近,相关的轴需要进行很大的加速。这将导致机器人的运动会被控制器停止并且产生一个错误

一、 机器人系统的安全要素:工作空间的限制
工作空间限制的方式包括:
软件方式设定轴的转角范围
用于某些轴的带有缓冲器的机械式制动
通过工作范围变量($WORKSPACE), 来监视机器人的工作范围
§例:软件限制轴1 信息。
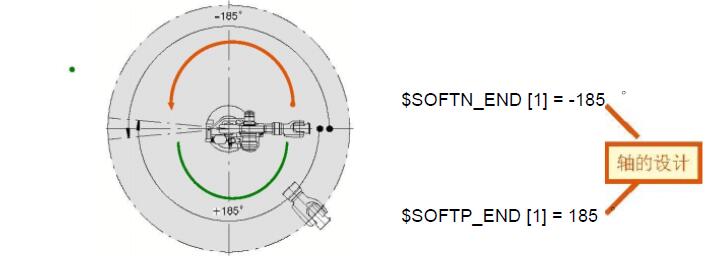
$SOFTN_END [1] = -185 °
$SOFTP_END [1] = 185 °
§例:: 机器人KR 125 上的机械限位

一些类型的机器人安装有气液式或机械式平衡系统。
气压液压平衡系统只能由具有丰富的气液系统经验的人员进行操作。
如果要操作气液平衡系统,由其辅助的机器人部件要固定牢,以防部件的移动。
二、机器人系统的安全要素:温度监控
电动机是通过温度传感器来控制其载荷的大小,从而防止过载的发生。
电动机在工作过程中会升温,会烫伤皮肤,所以要注意预防
控制柜的内部温度也是受控制的,当温度超过设定值,控制器的电源将会跳掉。
三、机器人系统的安全要素:试运行模式
试运行模式(安全功能)。所有的程序都可以在试运行的模式下低速运行。然而,其运行是要在按键“启动”被按下之后才可以,否则,机器人是不会动的。

四、机器人的安全要素:使能按键

KUKA 示教器(KCP)上的使能按键